Differential data transmission of CAN comfort/Infotainment data bus
In order to make the low-speed CAN anti-interference performance, the current consumption is low, and some changes are needed compared with the CAN drive data.
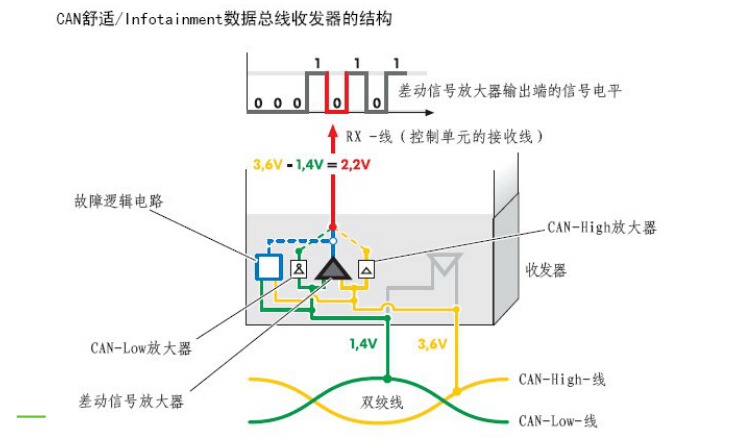
First, because of the use of a separate driver (power amplifier), the two CAN signals are no longer related to each other. Unlike the CAN drive data bus, the CAN-HIGH line and the CAN-LOW line of the CAN Comfort/Infotainment data bus are not connected by resistors. That is to say: the CAN-HIGH line and the CAN-LOW line do not interact with each other, but work independently as a voltage source.
In addition, the common medium voltage is also abandoned. In the recessive state (static level), the CAN-HIGH signal is 0V, and in the dominant state, it is ≥3.6V.
For the CAN-LOW signal, the recessive level is 5V, and the dominant level is ≤1.4V. Therefore, after subtraction in the difference frequency signal amplifier, the recessive level is -5V and the dominant level is 2.2V. Then the voltage change (voltage boost) between the recessive level and the dominant level is increased to ≥ 7.2V.
Due to the different voltage levels and resistor configurations, there is no coupling connection between the CAN drive data bus and the CAN Comfort/Infotainment data bus. In addition, the transmission rates of the two data buses are different, which determines that they cannot use different signals. This requires a conversion between the two systems. This conversion process is implemented through the gateway. Depending on the vehicle, the gateway may be installed in the instrument cluster. The power supply control unit on the vehicle is controlled by its own gateway. Within the unit.