CAN总线数据交换基本原理
2019-05-28 11:03:32
root
为了提高数据传递的可靠性,CAN数据总线系统的两条导线(双绞线)分别用于不同的数据传输,这两条线分别为CAN-HIGH和CAN-LOW线。
在静止状态时,这两条导线上的作用有相同预先设定值,该值称为静电平。对于CAN驱动数据总线来说,这个值大约为2.5V。
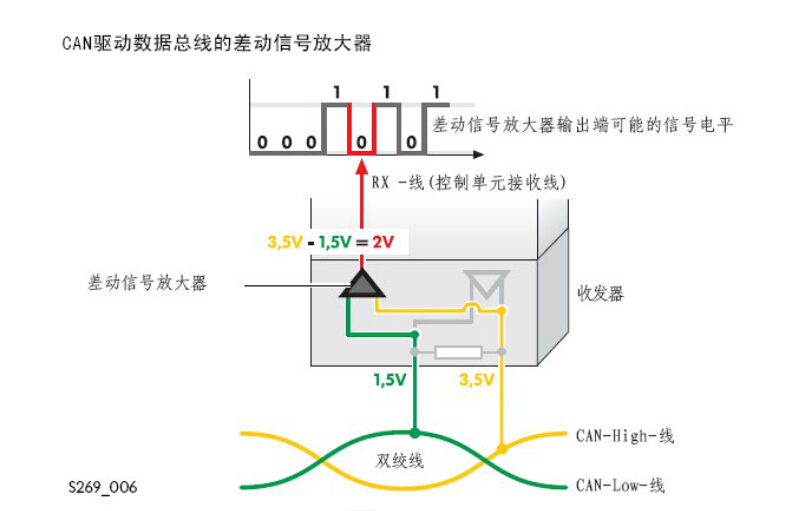
静电平也成为隐性状态,因为连接的所有控制单元均可以修改它。在显性状态时,CAN-HIGH线上的电压值会升高一个预定值(对CAN驱动数据总线来说,这个值至少为1V)。而CAN-LOW线上的电压值会降低一个同样值(对于CAN驱动数据总线来说,这个值至少为1V)。于是CAN驱动数据总线上,CAN-HIGH线就处于激活状态,其他电压不低于3.5(2.5V+1V=3.5V),而CAN-LOW线上的电压值最多可降至1.5V(2.5V-1V=1.5V)。
因此在隐形状态时,CAN-HIGH线与CAN-LOW线的电压差为0V,在显性状态时该差值最低为2V。
控制单元是通过收发器联接到CAN驱动总线上的,在这个收发器内有一个接收器,该接收器是安装在接受一侧的差动信号放大器。差动信号放大器用于处理来自CAN-HIGH和CAN-LOW线的信号,除此外还负责将转换后的信号传至控制单元的CAN接手区。这个转换后的信号成为差动信号放大器的输出电压。
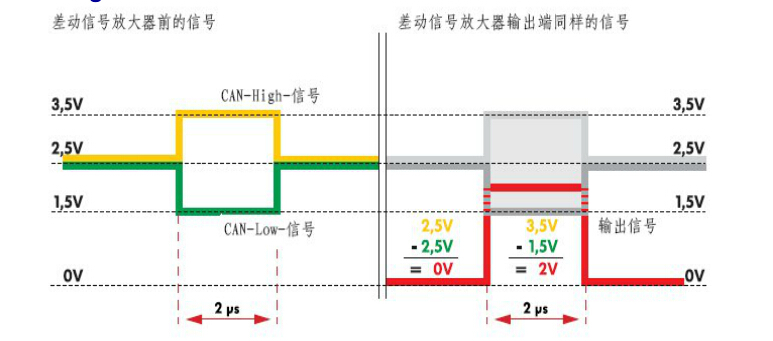
差动信号放大器用CAN-HIGH线上的电压(UCAN-HIGH)减去CAN-LOW线上的电压(UCAN-LOW),就得出了输入电压,用这种芳芳可以消除静电平(对于CAN驱动数据总线来说是2.5V)或其他任何重叠的电压。
由于数据总线也要布置在发动机舱内,所以数据总线就要遭受各种干扰,在保养时要考虑对地短路和蓄电池电压、点火装置的火花放电和静态放电。
由于CAN-HIGH线和CAN-LOW线是扭绞在一起的双绞线,所以干扰脉冲总是有规律作用在两条线上。由于差动信号放大器总是用CAN-HIGH线上的电压减去CAN-LOW线上的电压,因此在经过此处理后差动信号中就不再有干扰脉冲了。
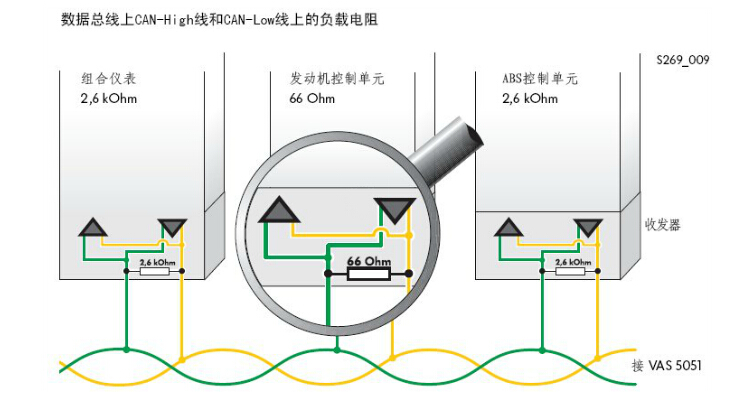
收发器发送一侧的任务是将控制单元内的CAN控制器的较弱信号放大,使之达到CAN导线上的信号电平和控制单元输入端的信号电平。联接在CAN数据总线上的控制单元的作用就像是CAN导线上的一个负载电阻(因为装有电子元件),这个负载电阻取决于联接的控制单元数量和其电阻。
收发器将CAN信号输送到CAN数据总线的两条导线上,相应地在CAN-HIGH线上的电压就升高,而在CAN-LOW线上的电压就降低一个同样大小的值。对于驱动CAN总线数据来说,一条导线上的电压改变值不低于1V,对于CAN舒适/Infotainment总线来说,这个值不低于3.6V。