-
速锐得解码汽车以太网技术特点接口定义数据传输及应用
在当前的汽车工业中,随着技术的飞速发展,车载网络技术也在不断进步与更新。其中,具备以太网的车型已成为一个新兴趋势,这主要归功于车载以太网技术在车内带宽需求较高的系统上的应用,如高级驾驶辅助系统(ADAS)、车载诊断系统(OBD)以及车载信息娱乐系统等。汽车以太网作为一项重要的技术革新,正逐渐成为现代汽车设计中不可或缺的一部分。这项技术的引入不仅极大地提高了车辆内部网络的数据传输速率,还为智能驾驶、
了解更多07-02 / 2024
-

OBD-II接口定义 OBD-II NETWORK STANDARDS
All cars and light trucks built for sale in the United States after 1996 are required to be OBD-II compliant. There are five OBD-II prot
了解更多03-06 / 2019
-

-

OBD 9种诊断模式
模式 Service ID 说明MODE 1 $01 请求动力系统当前数据MODE 2 $02 请求动力总成的冻结帧数据MODE 3 $03 请求排放相关的动力系统诊断故障码MODE 4 $04 清除/复位排放相关的诊断信息MODE 5 $05 请求氧传感器监测测试结果MODE 6 $06 请求非连续监测系统OBD测试结果MODE 7 $07 请求连续检测系统OBD测试结果MODE 8
了解更多05-14 / 2019
-
![OBD模块|各个车型的OBD位置]()
-
![OBD-II故障码解析]()
OBD-II故障码解析
一般来讲, OBD-II故障码由一位字母和四位数字组成。举例说, P0279OBD-II故障码常用缩略语:1. 电路/开路“电路/开路”大部分时候是用在固定值或具体电路高或低的检测是不可行的情况下。它也可以跟电路低和高故障码同时使用, 前提是所有三个电路状况都可以被检测的时候。2. 范围/性能“范围/性能”是指电路在正常工作范围之内, 但对当前运行状况来讲不正确。它可以用来指示
了解更多10-03 / 2016
-
![驾校OBD接入CAN总线数据大众朗逸仪表网关位置]()
驾校OBD接入CAN总线数据大众朗逸仪表网关位置
在汽车的复杂电路网络中,仪表网关扮演着信息枢纽的角色。对于驾校使用大众朗逸车主而言,了解仪表网关的位置不仅有助于日常维护,更是故障诊断和车辆升级的关键所在。大众朗逸作为一款深受消费者喜爱的车型,凭借其稳定的性能和经济的油耗赢得了广泛的市场认可。然而,即便是这样一款优秀的车型,在驾校使用过程中也难免会遇到一些技术问题,这时候对仪表网关的了解就显得尤为重要。18年后的大众,网关都是标配,直接从OBD通
了解更多06-21 / 2024
-
![速锐得智能汽车车身域CANFD控制芯片MCU接口电路原理图]()
速锐得智能汽车车身域CANFD控制芯片MCU接口电路原理图
CAN总线技术不仅涉及汽车电子和轨道交通,还涉及医疗器械、工业控制、智能家居和机器人网络互连,这些行业对CAN产品的稳定性和抗干扰能力都有很高的要求。上篇我们讲了在汽车CAN FD上,数据出错可能导致数据位被错误地解析为填充位,或者填充位被错误地解析为数据位,使数据位和填充位的个数发生变化,CAN FD采用了差分信号传输数据,通信的可靠性很高,错误位个数达到8的概率几乎为0。那么秉承着与其后期解决
了解更多07-25 / 2023
-
![速锐得开发社区-新一代汽车网络通信技术CAN FD的特点归纳]()
速锐得开发社区-新一代汽车网络通信技术CAN FD的特点归纳
随着汽车工业的快速发展,汽车逐渐走向智能化,功能也越来越丰富,例如特斯拉、比亚迪、理想汽车为代表,在车载导航、驻车雷达、胎压监测、倒车影像、无钥匙启动、定速巡航、自动泊车、高级辅助驾驶系统、自动驾驶、域控制器、智能网关等都有新的特点。为了提高竞争力,汽车制造商将越来越多的功能集成到汽车之中,我们的汽车就会变得交互性好、界面友好、智能化高级,这些功能的加入,增加了ECU(电子控制单元)的增加,进而使
了解更多07-24 / 2023
-
![速锐得原厂CAN协议实现丰田照明系统总成升级实现随动转向方案]()
速锐得原厂CAN协议实现丰田照明系统总成升级实现随动转向方案
你知道吗,现在大多数车型的LED大灯总成需要原厂CAN协议,才能支持改装后的汽车大灯总成实现完美兼容,而原有采用直接控制开关的方式,已经造成很多LED大灯总成已经满足不了当下大灯组灯光升级,造成了新品大灯总成无法点亮或者报故障码。作为CAN总线数据应用领域12年深耕的速锐得科技,早在6年前就看到奥迪矩阵大灯控制的逻辑与方法。并实践批量应用于坦克300、福特烈马、宝马汽车等多车型的CAN协议兼容,帮
了解更多02-16 / 2023
-
![速锐得解码新款坦克300网关(Gateway)采集CAN总线数据实操过程]()
速锐得解码新款坦克300网关(Gateway)采集CAN总线数据实操过程
灯光改装客户送来一台新款坦克300让速锐得安排对坦克的CAN总线数据采集,临时抱佛脚,我们准备了相关的工具,针对性接入坦克300车型进行了数据研究,拿到客户项目最核心关键数据。 坦克300具备网关(Gateway),不熟悉的朋友,我再简要解释下。网关(Gateway)是个工具,可以理解为当车辆存在多条高速或者低速CAN总线时,由于不同区域CAN总线的速率和识别代号不同,一个信号要从一个总
了解更多11-02 / 2022
-
![速锐得解码宝马B48远光灯结构总成设计电路控制DEMO方案]()
速锐得解码宝马B48远光灯结构总成设计电路控制DEMO方案
人家的车是买来开,我们的车是买来拆。近期,我们学会了一些拆卸汽车大灯总成的拆卸方法,于是,就把同事的宝马5系B48也同步搞出来研究一番。经过速锐得工程师研究,在最新车型宝马B48上,LIN以不同的结构安装在车辆中,其中大部分是由CAN总线控制,总线网络依然具备K-CAN、PT-CAN、D-CAN、BSD、LIN,以太网和FlexRay等。我们今天不聊太多,扯太远了,不经济,就讲个远光灯就行,你要觉
了解更多10-24 / 2022
-
![速锐得解码福特汽车LIN总线结构及灯光控制功能开关原理]()
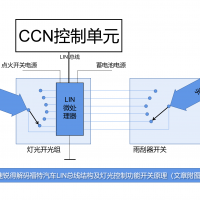
速锐得解码福特汽车LIN总线结构及灯光控制功能开关原理
福特汽车旗下有福特(Ford)、林肯(Lincoln)、水星(Mercury)三个品牌,重要车型有Thunderbird(雷鸟),Mustang(野马),F系列卡车,T系列轿车。文中涉及福特汽车LIN总线结构及灯光功能开关原理不涉及长安福特、江铃福特和福田汽车,因为没有在这些车上做过实际测试,也没有客户有项目和数据需求需要涉及这些方面,主要指的进口车系。 福特汽车LIN总线取代了原来的M
了解更多10-20 / 2022
-
![速锐得LIN总线在灯光控制系统的应用硬件设计]()
速锐得LIN总线在灯光控制系统的应用硬件设计
LIN是CAN总线系统的子网,也叫“局域子系统”。汽车上LIN总线控制的所有系统之间的数据交换,必须通过CAN总线控制单元才能实现。LIN总线作为CAN总线的一种有益补充,可以更为经济、有效地完成车辆功能。LIN结构比较简单,只有一根数据线,也只能用于传感器和执行器之间的简单数据传输。它与CAN总线不同,LIN总线上的控制单元分主、从的,主控制单元与CAN总线连接,控制着LIN总线上的其他从控制单
了解更多10-13 / 2022
-
![速锐得整车CAN网络控制策略数据解析方案]()
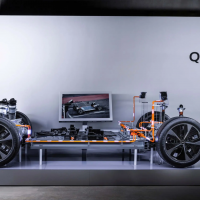
速锐得整车CAN网络控制策略数据解析方案
车载网络与信息技术是计算机网络通信、嵌入式系统以及信息安全理论与技术在车辆工程中的应用,是社会数字化、信息化发展在交通和非道路交通、汽车、其他出行领域的体现。这些技术一方面提升了汽车固有的功能水平和指标,另一方面也拓展了汽车功能和性能指标,同时也为更多关注乘客的驾驶乐趣方面、人车智能化交互方面、汽车智能设备、整车数据控制策略等方面的重要基础。那么汽车本质从一个机械系统,加入信息技术和应用后,技术所
了解更多04-24 / 2022
-
![速锐得EST580双CAN总线模块在驾考OBD免接线领域的设计与应用]()
速锐得EST580双CAN总线模块在驾考OBD免接线领域的设计与应用
辞旧迎新,2021年已经来临,我国汽车工业发展加速了速锐得在新大众桑塔纳、捷达、东风雪铁龙爱丽舍、吉利金刚、东南V5、斯柯达昕锐等多种车型驾培驾考OBD模块交付,2020年交付100K+级,预计2021年累计订单量将超过300K+,在新款的捷达、桑塔纳、爱丽舍、斯柯达等多种驾考车型兼容的模块中,一骑绝尘。除了行业朋友说的“性价比”(低至200元以内),那是什么让驾考行业朋友趋之若鹜呢?
了解更多01-14 / 2021
-
![国六在线监控OBD终端H6GB信息安全防篡改技术实现]()
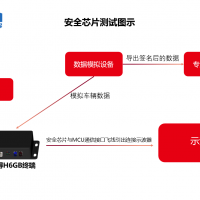
国六在线监控OBD终端H6GB信息安全防篡改技术实现
速锐得TBOX终端符合国标GB17691-2018和GB/T32960.2-2016,在国六安全策略中,提供了技术可行的安全策略,保证TBOX各种性能处于安全范围,例如电气适用性能、环境适用性能、可靠性性能、电磁兼容性性能、一般要求、功能要求等各项指标。 TBOX终端存储、传输的数据是加密的,采用非对称算法,使用国密SM2算法或者RSA算法,并且采用硬件方式对私钥进行严格保护,数据传输过
了解更多05-07 / 2020
-
![汽车网关(gateway)系统的作用原理及部分车型网关位置]()
汽车网关(gateway)系统的作用原理及部分车型网关位置
近期,很多车联网客户反馈汽车远程数据终端无法直接通过OBD接口采集汽车CAN数据,其实这个原理上说的是简单,但是实际操作起来就比较复杂,那今天我给大家梳理下,共同再熟悉了解下网关,绕过网关来采集数据,或者直接在网关上采集数据。 一、网关是何方神圣?我们知道,从一个房间走向另一个房间,需要经过一扇门。在汽车上,这些动脑筋的工程师把这个简单的进出门用到了汽车上:从一个网络向另外一个网络发送信
了解更多04-22 / 2020