-
![重型燃油汽车排放污染物治理物联网智慧诊断系统原理]()
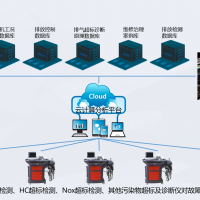
重型燃油汽车排放污染物治理物联网智慧诊断系统原理
随着智慧社会的加速到来,汽车及多个产业正从数字社会向智能社会演进,以云计算、大数据、5G、物联网、车联网等为核心的信息和通信技术成为数字化转型的必然选择。智慧检测与诊断既是检测平台也是诊断平台,是一个综合的物联网应用具有集检测、云技术运算、大数据分析的智慧检测诊断平台。一、SAE J1939总线数据采集部分汽车90%故障来自汽车电气系统,ECU控制单元的增多对于信息的共享、交换有了更高的要求,汽车
了解更多04-09 / 2020
-
![宝马冷却系统及电动冷却液泵部件(电子水泵)功能特性及标准]()
宝马冷却系统及电动冷却液泵部件(电子水泵)功能特性及标准
宝马发动机的冷却系统由冷却液冷却系统和发动机机油冷却系统组成。根据宝马车辆规格,使用不同类型的发动机机油冷却系统。在热带国家的规格中,将发动机机油冷却器与冷却液循环隔离,避免热量通过发动机机油进入发动机的冷却液中。 在欧洲规格中,车辆左边配备了一个扩展的辅助冷却液冷却器。此辅助冷却液冷却器与冷却液管平行连接在冷却器上,从而增大了发动机冷却面积,发动机机油冷却可以通过一个油-水热交换实现。
了解更多03-17 / 2020
-
![国六OBD在线监测中动力系统及排放诊断CAN标准特性]()
国六OBD在线监测中动力系统及排放诊断CAN标准特性
汽车动力系统CAN总线主要与汽车安全相关,它的实时性要求比较高,所以传输速率比较高,通常在125kb/s-1Mb/s之间,必须支持周期性、实时的参数传输。 欧洲汽车制造商基本采用的都是高速通信的CAN总线标准如ISO11898,而国六OBD在线监测中车辆动力系统大多采用J1939协议,这个协议广泛适用于卡车、大客车、建筑设备、农业机械等工业领域的高速通信。J1939协议及其特征总线及协议
了解更多02-19 / 2020
-
![纯电动汽车CAN总线应用整车控制策略研究与经验]()
纯电动汽车CAN总线应用整车控制策略研究与经验
纯电动汽车的国内外发展背景 汽车享有“第一商品”的美誉,因为,汽车工业的发展,可以带动众多产业发展。一辆轿车的零部件数以万计,附加值很高,一辆车背后是一系列的产业。因此,汽车工业也就成为了衡量一个国家工业化水平和综合科技水平的重要标志。我国的汽车工业水平落后先进国家,短时间内在内燃机领域是不可能消除差距的,中国大规模发展然后车动力汽车在环境、资源、技术等方面面临严重压力,所以,从国内的资
了解更多02-12 / 2020
-
![速锐得适配宝马奥迪大众捷豹路虎CAN总线访问控制经验]()
速锐得适配宝马奥迪大众捷豹路虎CAN总线访问控制经验
随着汽车电子控制单元以及汽车电子装置的不断增多,采用串行总线实现多路传输,组成汽车电子网络,是一种既可靠又经济的做法。在协议的管理下,若干控制单元、若干终端、传输设备和通信控制处理器等组成系统集合。 汽车电子控制网络是按照特定的车载网络协议,如CAN2.0、以太网等,以共享资源为目的,将所有位置上分散且独立的车载控制模块相互连接在一起的集合,我们想要实现对总线的数据应用,就得进入网络去实
了解更多01-17 / 2020
-
![国六OBD排放移动源(商用车)动力系统与ECU之间的通讯]()
国六OBD排放移动源(商用车)动力系统与ECU之间的通讯
早在1994年,美国移动源商用车中动力系统与ECU之间的通讯采用了SAEJ1587/J1708,由于这两种协议使用微处理器的串行通讯,因而数据质量较低。速锐得在大量现有车型测试中,涉及国六OBD排放移动源的动力系统和ECU之间的通讯都更新到了SAE J1939,有的采用的是ISO15765,也有部分采用的是 ISO-14229。这些类型的通讯协议大多用于卡车、大客车、建筑机械、农业机械等CAN通讯
了解更多01-17 / 2020
-
![汽车CAN总线协议规范]()
汽车CAN总线协议规范
在汽车电子行业里,使用CAN连接发动机控制单元、传感器、方刹车系统等等,其传输速度可达到1Mbit/s,同时,可以将CAN安装在汽车主题的电子控制系统里,诸如车灯组、电器车窗等等,用以代替接线配线装置,CAN为串行通讯协议,能有效地支持具有很高安全等级的分部实时控制。技术规范的目的是为了在任何两个CAN仪器之间建立兼容性,我们从数据链路层和物理层做些分析: 在以前的CAN协议规范中,数据
了解更多05-28 / 2019
-
![CANBUS总线中驱动数据总线与舒适数据总线的区别和特点]()
CANBUS总线中驱动数据总线与舒适数据总线的区别和特点
一、CANBUS驱动数据总线的特点汽车CANBUS驱动数据总线的速率为500Kbit/s,用于将CAN驱动数据总线方面的控制单元联成网络。CAN驱动数据总线控制单元有:-发动机控制单元-ABS控制单元-ESP控制单元-变速器控制单元-安全气囊控制单元-组合仪表CAN驱动数据的总线由15号接线柱(点火开关)接通,短时工作后又进入到完全关闭状态。 二、CAN舒适/Infotainment数据
了解更多05-28 / 2019
-
![CAN舒适/Infotainment数据总线的差动数据传递]()
CAN舒适/Infotainment数据总线的差动数据传递
为了使低速CAN抗干扰性能强切电流消耗低,与CAN驱动数据相比就需要做一些改动。首先,由于使用了单独的驱动器(功率放大器),这两个CAN信号就不再有彼此以来的关系了。与CAN驱动数据总线不同,CAN舒适/Infotainment数据总线的CAN-HIGH线和CAN-LOW线不是通过电阻相连的。也就是说:CAN-HIGH线和CAN-LOW线不在彼此相互影响,而是彼此独立作为电压源来工作。另外还放弃了
了解更多05-28 / 2019
-
![各车厂使用的OBD诊断协议汇总]()
各车厂使用的OBD诊断协议汇总
各车厂使用的OBD诊断协议汇总 Model1996199719981999200020012002200320042005200620072008Audi/VWISO-9141ISO-9141ISO-9141ISO-9141ISO-9141ISO-9141ISO-9141ISO-9141ISO-9141ISO-9141ISO-9141ISO-9141CANKWP 2000KWP 2000
了解更多05-28 / 2019
-
![GPS纠偏0.01精度工具/算法案例]()
GPS纠偏0.01精度工具/算法案例
精度工具下载 :http://map.yanue.net/gps.html 该校正适用于 Google map China, Microsoft map china ,MapABC 等,因为这些地图构成方法是一样的需要offset.dat文件,该文件为0.01精度校正数据, 有需要者请联系本网站人员, 非免费版本。 算法演示: ?1234567891011
了解更多05-28 / 2019
-
![汽车CAN总线报文结构]()
汽车CAN总线报文结构
汽车CAN总线的信息包括两部分:信息部分和数据部分。头两个字节为信息部分,其前是一位为标识符,标识符中的前8位用作接收判断,应包涵本信息包的目的地址。然后是以为RTR位(应设置为0),最后是4位的DLC。DLC是数据长度位,即所发数据的实际长度,单位是字节。其余8个字节是数据部分,存有实际要发的数据可以参考下面这个图: 在进行数据传送时,发出报文的单元称为该报文的发送器。该单
了解更多05-28 / 2019
-
![CAN总线布置、结构和基本特点]()
CAN总线布置、结构和基本特点
CAN总线系统上并联有多个原件,这就要求整个系统的布置满足以下要求:1、可靠性高:传输故障(不论是由内部还是外部引起的),应能准确识别出来;2、使用方便:如果某一控制单元出现故障,其余系统应尽可能保持原有功能,一边进行信息交换;3、数据密度大:所有控制大院在任一瞬时的信息状态均相同,这样就使得两控制单元之间不会有数据偏差。如果系统的某一处有故障,那么总线上所有连接的原件都会得到通知。4
了解更多05-28 / 2019
-
![CAN总线数据交换基本原理]()
CAN总线数据交换基本原理
为了提高数据传递的可靠性,CAN数据总线系统的两条导线(双绞线)分别用于不同的数据传输,这两条线分别为CAN-HIGH和CAN-LOW线。在静止状态时,这两条导线上的作用有相同预先设定值,该值称为静电平。对于CAN驱动数据总线来说,这个值大约为2.5V。静电平也成为隐性状态,因为连接的所有控制单元均可以修改它。在显性状态时,CAN-HIGH线上的电压值会升高一个预定值(对CAN驱动数据总线来说,这
了解更多05-28 / 2019
-
![汽车CANBUS总线的同步机制]()
汽车CANBUS总线的同步机制
汽车CANBUS总线的位同步只有在节点检测到“隐性位”到“显性位”的跳变时才会产生,当跳变沿不位于位周期的同步段之内时,将会产生相位误差。该相位误差就是跳变沿与同步段结束位置之间的距离。如果跳变沿发生在同步段之后采样点之前为正的相位误差,如果跳变沿位于同步段之前采样点之后为负的相位误差。相位误差源于节点的震荡漂移,网络节点之间的传播延迟以及噪声干扰等。在汽车总线上,同步机制一般分为两种:硬同步硬同
了解更多05-28 / 2019
-
![CANBUS总线双绞线的作用及特点]()
CANBUS总线双绞线的作用及特点
CANBUS采用双绞线自身校验的结构,既可以方式电磁干扰对传输信息的应用,也可以防止本身对外接的干扰,CAN系统中采用高低电平两根数据线,控制器输入的信号同事向两根通讯线发送,高低电平互为镜像。并且每一个控制器都增加了终端电阻,已减少数据传输时的过调效应。原则上CAN总线用一条导线就足以们组功能要求了,但该总线系统上还是配备了第二条导线上,信号是按相反顺序传送的,这样可有效抑制外部干扰
了解更多05-28 / 2019
-
![CAN总线的起源]()
-
![OBD 知识科普]()